FR
FR DE
DE IT
IT








TZT ROS Robotas Mecanum Automobilių SLAMTEC A1 Standartinė Versija + Gylio Fotoaparatas + Aviečių Pi 4B 2GB/4GB
€492.26
Žymos: miršta robotai, drone robotas, juoda spock, robotų rankos, valties variklio modelis, robotas žaislas, rankos robotas, 18650 žingsnis iki, flybarless, mecanum varantys.
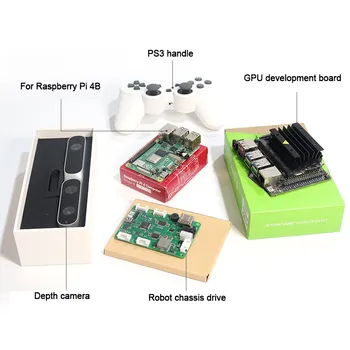
ROS Robotas Mecanum Automobilių SLAMTEC A1 Standartinė Versija + Gylio Fotoaparatas + Už Aviečių Pi 4B 4GB
Privalumai:
1. Visada sutelkti dėmesį į kokybę, mokymo kursus ir pradėti mokyti nuo kodo sistema.
2. Suteikti puikų išsilavinimą platforma su aukštos kainos ir sprendimus.
3. Robotas-gautas ROS funkcijas, yra visi savarankiškai sukūrė kodus.
4. Pagrindinės robotas yra pagaminti iš metalo dalys, modelis lėktuvas.
5. Kai robotas yra įjungtas, jis bus automatiškai atidaryti WiFi, ir jūs galite sukurti ir sužinoti prisijungus, be jokių varginančių konfigūravimo darbai.
6. Niekada viską, bet sąsajas gimtoji ROS sistemą taip, kad gimtoji mokymąsi galima išsamesnis.
7. Atidžiai registruotų kodas paaiškinimas ir operacijos vaizdo įrašus iš robotas sistemos lygmeniu, kad suprasti daugiau, išsamiai ir nuodugniai.
8. Mes turime daugiau profesionalią ir visapusišką techninę Q&A komanda, greitai, užduoti klausimus ir atsakyti į klausimus.
9. Atsakydamas į klausimus, esamomis technologijomis, daugiausia atsakingas už plokštės dizainas, įterptųjų sistemų, giliai ir mokymosi, vaizdo apdorojimo, ir ROS robotas sistemos.Tik profesionalus Q&A atneš daugiau profesinės absorbcija.
10. Visą struktūrą ir robotas yra surenkami gamykloje, o pagrindiniai komponentai yra sumontuoti ir išbandyti profesionalūs inžinieriai.
11. Visą robotas yra surinktos ir išbandytos prieš pristatymą.
Savybės:
- Vaizdo SLAM navigacija: Maisto pristatymo robotas, AGV automobilių, valymo robotas, pristatymo robotas
- 3D mapping gylis
- Lidar sukurti žemėlapį
- Maršruto planavimas ir automatinis navigacijos
- Vaizdo stebėjimo kameros
- Fotoaparato vaizdo linijos apžiūros
- Patalpų padėties nustatymo dinaminis kliūčių išvengimo
- Mobile APP " žemėlapių ir navigacijos
- Už OPENCV veido aptikimas
- ROS hodometro rodmens
- Mecanum varantys lidar robotas: Priekiniai sukimo sustabdymas, tiksliau kinematics duomenys
- Išsami video kursai: ROS pagrindinio vaizdo kursas, ROS robotas vaizdo kursas, lazerio SLAM " algoritmas, žinoma.Visi atviro kodo paaiškinimas.
- Lidar ir gylio fotoaparatas yra panašios statyti trimatis žemėlapio.Remiantis RTABMAP-VSLAM kartografavimo, robotas gali atlikti navigacijos ir pasaulio perkėlimas
- Pagrindinės sudedamosios dalys robotas tinklų: Pateikite AP, Maršrutizatorius, Kliento, Kartotuvas, Tiltas darbo režimai.Maršrutizatorius yra įrengti viduje robotas.AP režimu, robotas automatiškai atidaryti WIFI hotspot, kai jis yra įjungtas, ir kompiuteris gali prisijungti prie nuotolinio vystymosi.Į relės režimu, jis gali būti perduodamas į bet kokį tinklą, kuris yra patogus tinklų, grupės, kontrolė, valdymas, Interneto prieiga.Daug WIFI maršrutą režimus, lengva konfigūracija interneto puslapiuose, prisitaikyti prie daugiau robotas derinimo aplinka.TP-Link-WR702 palaiko didesnį belaidžio ryšio maršruto režimai, stipresnis greičiu, ir didesnę tinklo aprėptį.
- Keturios lazerinių slam metodai: Cartographer, Gmapping, Hektoras, ir Karto.
- Paramos kompiuterių ir mobiliųjų telefonų žemėlapių ir navigacijos.
- ROS robotas gylio fotoaparatas sudedamosios dalys: įrengta aukštos klasės SP mikroschema, gali automatiškai reguliuoti užrakto optimizuoti atvaizdą pagal aplinką, tinkamą robotas matymo ir vaizdo apdorojimo. 1080P RGB įprasta kamera, gylis camera, dual stereo mikrofonus.
Spartesnis Procesorius:
CPU skaičiavimo greitis yra daugiau nei tris kartus, kad PI3B+.
① Naujas procesorius Pi4B modelis BCM2711, Pi3B+ yra BCM2837B0.
② Naują core procesorius yra atnaujinama iš Pi3B+s 4-core už CORTEX-A53 4-core už CORTEX-A72.
③ , Naujos gamybos procesas buvo atnaujintas iš originalo 40nm, kad Pi4B tai 28nm
④ Aukštojo pagrindinis dažnis padidėjo nuo Pi3B+s su 1,4 GHz 1,5 GHz
Techniniai Parametrai:
- Robotas modelis: HuanYuBot-H20X03
- ROS robotas pagrindinis kontrolės valdyba: Už Aviečių Pi 4B quad-core Cortex-A72
- Pagrindinis kontrolės valdyba SD kortelės talpa: Už Sandisk 32GB
- Lidar: SLAMTEC Rplidar Al Lidar
- Apačioje kontrolės valdyba: STM32F405RGT6
- Kinematics modelis: Mecanum įvairiakryptė kinematics modelis
- Variklis: 12V DC teptuku varikliu, 330 apsisukimų per minutę
- Korpuso medžiaga: 2,5 mm mėlyna didelio stiprio aliuminio plokštės (paviršiaus oksidacijos ir šlifavimas)
- Dydis: 30 x 23 x 22cm (ilgis * plotis * aukštis)
- Įkroviklis: 12,6 V 2A įkroviklis
- Kūno svoris: 2kg
- Didžiausia apkrova: 3 kg
- Encoder rezoliucija: 1300 impulsų per varantys revoliucija
- Kamera: kameros gylis
- Įtampa ekranas: trijų segmentų LED nurodant galia
SLAMTEC A1 Standartinės Versijos:
- Bandymo spindulys: 12 M
- Matavimo dažnis: 8000 kartų per sekundę
- Skenavimo dažnis: 5.5 Hz
- Nuskaitymo metu: 180ms
Pakuotė:
- 1 x Rinkinys ROS Robotas Automobilis (Prašome pasirinkti, Aviečių Pi 4B 2GB arba 4GB)
Pastaba:
- 12,6 V 6000mAh baterija yra rekomenduojama.Baterijos nėra įtrauktas.
- Tai surinkti.
① Jungiklis sąsaja
②③ Motorinių encoder sąsaja
④ Baterija sąsaja(Baterijos neįtrauktos)
⑤ Pavara lustas
⑥ IMU požiūris jutiklis
⑦ Rezervuota nuoseklųjį prievadą
⑧ 12V 5A rezervuota
⑨ CP2102 nuoseklųjį prievadą lustas
⑩ Įkrovimo lizdas
⑪ Kompiuterio ryšio sąsaja
⑫ Trys vidinės baterijos indikatorius
⑬ SWD programą, parsisiųskite sąsaja
⑭ Priimančiosios kompiuterio maitinimo sąsaja
⑮⑯ Motorinių encoder sąsaja
| Techniniai parametrai | Vertė-2 |
| Prekės Pavadinimas | TZT |
| Medžiaga | Metalo |
| RC Dalys ir Acc | Varikliai |
| Modelio Numeris | 25 |
| Kiekis | 1 |
| Įrankis Prekes | Baterija |
| Dydis | 15 |
| Naudoti | Transporto Priemonės Ir Nuotolinio Valdymo Žaislai |
| Ratų bazė | Varžtai |
| Nuotolinio Valdymo Periferiniai Įrenginiai/Įrenginių | Nuotolinio Valdymo Pultelis |
| Transporto Priemonės Tipas | Valtys |
| S | 69854 |
| Kilmės | KN(Kilmės) |
| Atnaujinti Dalys/Priedai | RANKOS |
| Keturi varomi Ratai Atributai | Surinkimas |